透视投影矩阵的推导
本文完全 copy 自 透视投影矩阵的推导 - bluebean - 博客园 (cnblogs.com)
只是用 markdown 将公式全部又打了一遍

图1: View Frustum
Perspective Projection Matrix 的任务就是把位于视锥体内的物体的顶点 (x, y, z) 坐标映射到 [-1, 1] 范围。(如果是 DX 可能是 [0, 1] 范围?)
这相当于把这个四棱台扭曲变形成为一个立方体。这个立方体叫做 规则观察体 (Canonical View Volume, CVV)。如下图
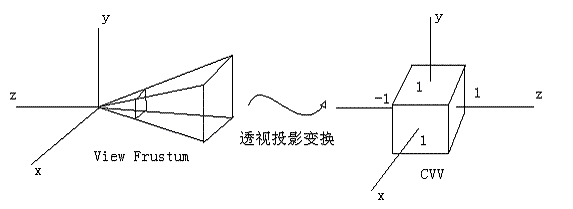
图2 透视投影变换
变换方法或规则
如下图,有一点 \(P\),位于视椎体内,设坐标为 \((x, y, z)\)。分别对 x, y 坐标和 z 坐标变换到 [-1, 1] 的方式进行讨论
1. x, y 坐标的变换方式
- 连接视点 eye 与 \(P\) 点与 NearClipPlane 交于 \(P'\) 点
- 设 NearClipPlane 的宽度为 \(W\), 高度为 \(H\), \(P'\) 点的 x 坐标范围是 \([-W/2, \ W/2]\),y 坐标范围为 \([-H/2, \ H/2]\),然后分别映射至 [-1, 1] 内即可。
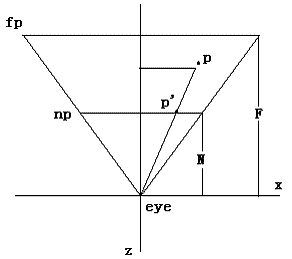
图3 x, y 坐标的变换方式
2. z 坐标的变换方式
z 坐标的范围是 N 至 F,需要映射到 [-1, 1]。映射方法暂时按下不表。
透视投影函数形式
void Matrix4X4::initPersProjMatrix(float FOV, const float aspect, float zNear, float zFar)
-
FOV-
纵向的视角大小
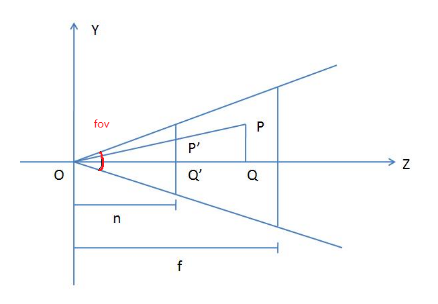
图4 透视投影函数参数说明
-
-
aspect- 裁剪面的宽高比
-
zNear- NearClipPlane 离 camera 的距离,图 4 中的 n
-
zFar- FarClipPlane 离 camera 的距离,图 4 中的 f
计算 P 的投影 P‘ 的归一化 P''
通过这几个参数和三角函数可得 near clip plane 的高度:
推出
因为 \(aspect = W/H\),故
根据相似三角形
求得 点 \(P\) 在 near clip plane 的投影点 \(P'\) 的坐标
\(x\), \(y\) 的范围沿原点对称,只要将它们分别除以 \(W/2\), \(H/2\) ,就可以使其范围位于 [-1, 1] 内。将 式(2), (3) 代入式 (5), (6),得
假设 \(z \in [-1, 1]\),则最后需要的点 \(P''\) 为
推导矩阵
寻找一个矩阵使得
我们发现求解
很难找到合适的 \(m_{00}, m{02}\),因为坐标 x 和 z 是以加法的形式相邻,右边 z 却成为了 x 的分母。
解决方法:
将右边以四维列向量表示的坐标每一项乘以 z ,有:
因此可得矩阵为
第三行第一列
又因为 \(z = zNear\) 时,\(z''=-1\)
\(z= zFar\) 时,\(z'' = 1\)
故
联立求得
又 \(1/\tan(FOV/2) = cot(FOV/2)\),故 投影矩阵为
将这样的矩阵乘以视锥体中的一个顶点坐标,得到一个新的向量,再将这个向量的每个分量除以第四个分量 \(w\) (这一步叫做透视除法,在 GPU 渲染管线中位于 VertexShader 处理之后,由硬件自动完成),之后就得到了 规则立方观察体中的新坐标。
ZBuffer 中的深度值 DepthValue
z 坐标的映射方式的获得,最后我们是为了方便矩阵乘法的操作,反向求得了 z 坐标与 CVV 中的 z 坐标的映射方式:
可见两者的映射并不是线性的,如下图所示
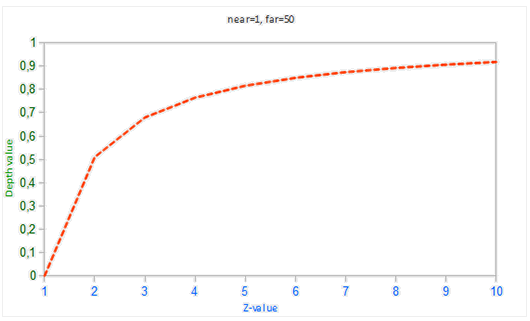
上图为 深度缓存中的深度值 DepthValue 和 物体距离摄像机深度 ZValue 的关系图,其中 \(DepthValue = \displaystyle \frac{z'' + 1}{2}\),将深度值从范围 [-1, 1] 转换到 [0,1]
代码示例
void Matrix4X4::initPersProjMatrix(float FOV, const float aspect, float zNear, float zFar)
{const float zRange = zNear - zFar;const float tanHalfFOV = tanf(ToRadian(FOV / 2.0f));elements[0][0] = 1.0f / (tanHalfFOV * aspect);elements[0][1] = 0.0f;elements[0][2] = 0.0f;elements[0][3] = 0.0f;elements[1][0] = 0.0f;elements[1][1] = 1.0f / tanHalfFOV;elements[1][2] = 0.0f;elements[1][3] = 0.0f;elements[2][0] = 0.0f;elements[2][1] = 0.0f;elements[2][2] = (-zNear - zFar) / zRange;elements[2][3] = (2.0f * zNear * zFar) / zRange;elements[3][0] = 0.0f;elements[3][1] = 0.0f;elements[3][2] = 1.0f;elements[3][3] = 0.0f;
}
本文是完全 copy 自 透视投影矩阵的推导 - bluebean - 博客园 (cnblogs.com)